
Heterogeneous Robot Teams Performing Resilient Target Search
Abstract This paper proposes KC-TSS: K-ClusteredTraveling Salesman Based Search, a failure resilient path planning algorithm for...

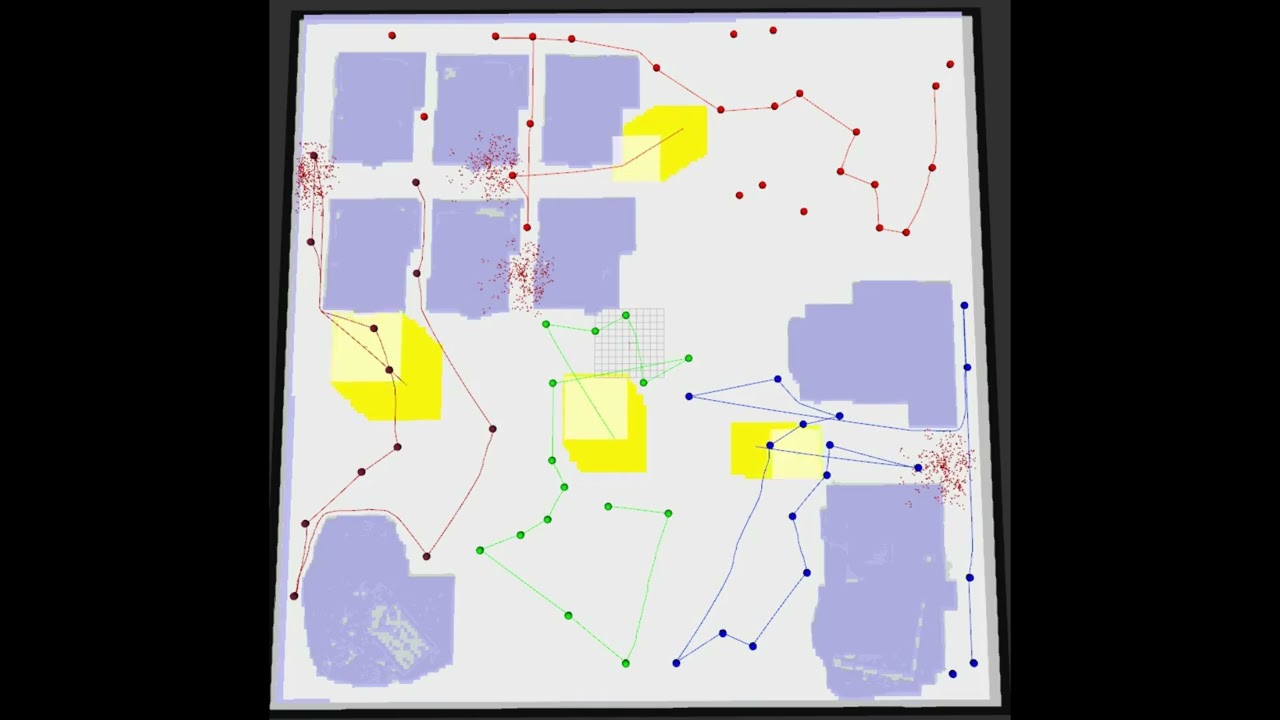
Three robot Search (Two A1s + HSR)
This paper proposes KC-TSS: K-Clustered-Traveling Salesman Based Search, an online path planning algorithm for heterogeneous robot teams...

Information-Theoretic Based Target Search withMultiple Agents
This paper proposes an online path planning and motion generation algorithm for heterogeneous robot teams performing target search in a...

[HSR] Robots Helping Humans to Coordinate Workload Backlog
With the primary objective of human-robot interaction being to support humans' goals, there exists a need to formally synthesize robot...

[HSR] Active Perception ( Active Object Tracking)
When performing visual servoing or object tracking tasks with a mobile manipulator, active sensor planning is essential to keep targets...

[HSR] Person Following Robot with Active Target Search
This work addresses a framework for person-following robots using active search. The proposed system is applied to the Toyota Human...




